
نابالانسی




































نوشته های مشابه

نابالانسی ماشین های عمودی
نابالانسی ماشین های عمودی Vertical machines imbalance نابالانسی ماشین های عمودی Vertical machines imbalance
نابالانسی ماشین های عمو...

نابالانسی ماشین های آویخته
نابالانسی ماشین های آویخته
در مقاله قبلی، نابالانسی دینامیک را بررسی کردیم. در این مقاله، به نابالانسی ماشین های آویخته خواهیم پردا...

نابالانسی دینامیک
در مقاله قبلی به نابالانسی کوپل پرداختیم، قصد داریم در این مقاله با نابالانسی دینامیک با شما همراه باشیم.
نابالانسی دینامیک
...

نابالانسی کوپل
نابالانسی کوپل نامیزانی پول couple unbalance نابالانسی کوپل نامیزانی پول couple unbalance
در مقاله قبلی به نابالانسی استاتیک پرداختی...

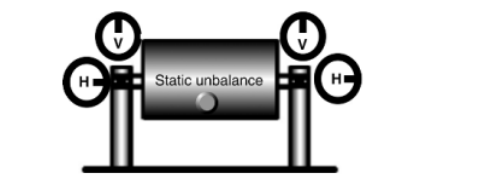
نابالانسی استاتیک
نابالانسی استاتیک static unbalance static unbalance static unbalance static unbalance
ارتعاشات حاصل از نابالانسی، رایج ترین عیب د...

تشخیص دوران معکوس پمپ
ماشین آلات دوار تحلیل و عیب یابی ماشین های دوار ماشین آلات دوار تحلیل و عیب یابی ماشین های دوار ماشین آلات دوار تحلیل و عیب یابی ماش...